机器人仿真软件应用
――点焊任务

1.完成点焊机器人应用配置;
2.实现焊接对象的仿真,并根据需要选择合适的焊枪和机器人;
3.机器人离线程序的生成。

1.对任务进行布局和规划;
2.根据实际需要作出仿真;
3.离线程序生成并导入到机器人控制器进行实际验证。

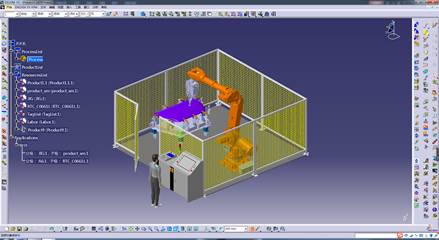
通过仿真软件的模拟,能够增强对实际点焊应用的了解。离线程序的导出,可加快现场程序编写的速度。

一、点焊机器人及配套设备的导入
二、机器人程序示教。

三、离线程序的生成

四、离线程序在线验证
五、评价表
评价表
| 班级:___________ 小组:___________ 姓名: |
指导教师: 日期:___________ |
| 评价项目 |
评价标准 |
评价依据 |
评价方式 |
权重 |
得分小计 |
| 学生自评20% |
小组互评30% |
教师评价50% |
| 职业素养 |
1. 遵守企业规章制度、劳动纪律 2. 按时按质完成工作任务 3. 积极主动承担工作任务,勤学好问 4.人身安全与设备安全 5.工作岗位7S完成情况 |
1. 出勤 2.工作态度 3.劳动纪律 4.团队协作精神 |
|
|
|
0.3 |
|
| 专业能力 |
1. 仿真整体布局 2. 机器人程序示教 3. 机器人轨迹优化 4. 机器人离线程序的导出 5. 离线程序的验证 |
1.操作的准确性和规范性 2.工作页或项目技术总结完成情况 3.专业技能任务完成情况 |
|
|
|
0.5 |
|
| 创新能力 |
1. 在任务完成过程中能提出自己的 有一定见解的方案 2. 在教学或生产管理上提出建议,具 有创新性 |
1.方案的可行性及意义 2.建议的可行性 |
|
|
|
0.2 |
|
| 合计 |
|